Paper Notes: Human-level control through deep reinforcement learning
- Paper Link: http://dx.doi.org/10.1038/nature14236
- Source Code: https://sites.google.com/a/deepmind.com/dqn for non-commercial uses only
This paper is quite interesting. It present a network structure and an end-to-end training algorithm to build up RL agent. The network consumes raw pixel input and output a softmax of actions. They use the same hyperparameters on different Atari games to train agents and most of them play quite good.
Preprocessing
- Use no audio. Raw pixel
210x160is converted to84x84and RGB channels are converted to a single luminance channel. - Because the limit of Atari hardware, some colors may only show in alternating frames. So they take the max of the consecutive 2 frames. (My Note: actually, the Atari emulator supports taking the average automatically, since this was the common limitation of Atari hardware)
- They stack 4 consecutive frames. (My Note: in this way, the network can in some way detect some motions, like velocity, acceleration, etc) So the network input is
84x84x4.
Network Structure
- Input:
84x84x4 - Conv1:
8x8x32, stride 4, ReLU - Conv2:
4x4x64, stride 2, ReLU - FC1: 512 nodes, ReLU
- Output: FC, no activation, # of actions
Evaluation
- The trained agents were evaluated by playing each game 30 times for up to 5min each time with different initial random conditions.
- To create different initial random conditions, they force the agent make no-op for a random steps.
- e-greedy: epsilon = 0.05 to prevent overfitting during evaluation.
Training
- Train a different agent on each game, but the same hyperparameters are used.
- Rewards are clipped to
[-1, +1]. - Life counter in the game are treated as a symbol for the end of an episode.
- RMSProp
- Batch size 32
- Behavior policy: e-greedy. Epsilon linearly decreases from 1.0 to 0.1
- Train a total of 50 million frames.
- Frame-skipping technique: the agent sees and selects actions on every 4 frames. This is said to increase performance 4x.
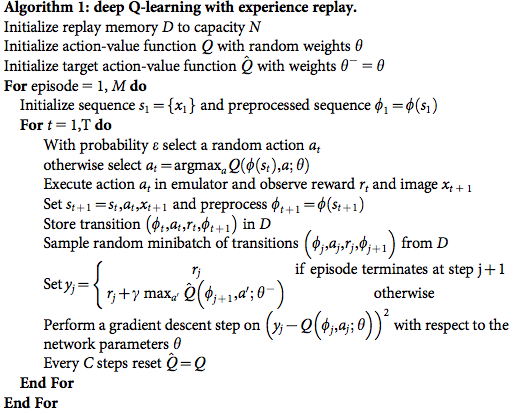
- The algorithm modifies standard online Q-learning in two ways to make it suitable for training large neural networks without diverging.
- Experience Replay
- $e_t = (s_t, a_t, r_t, s_{t+1}, T_t)$, where $T_t$ is true if terminal state.
- $D_t = { e_1, \cdots, e_t }$
- Sample minibatch $(s, a, r, s’, T) \sim U(D)$
- Replay buffer size: 1m
- Use a separate network for generating the targets $y_j$ in the Q-learning update
- Every C updates clone the network Q to obtain a target network $\hat{Q}$ and use $\hat{Q}$ for generating the Q-learning targets $y_j$ for the following C updates to Q.
- C = 10k
- Experience Replay